Visual Components dévoile « Visual Components Robotics OLP », résultat de l’intégration de ses puissantes capacités de simulation 3D avec sa nouvelle technologie de programmation hors-ligne (PHL ou OLP). Cette unification répond aux défis croissants de productivité et de flexibilité auxquels sont confrontées les entreprises manufacturières, face à la complexité des lignes automatisées et à la pénurie de main-d’œuvre qualifiée.
La programmation hors-ligne : un catalyseur d’efficacité pour l’utilisation des robots
L’adoption croissante de robots industriels se heurte souvent aux limitations de la programmation manuelle via les pupitres d’apprentissage. Cette méthode, chronophage et nécessitant l’immobilisation du robot pendant la phase de programmation, freine l’optimisation de leur utilisation. La programmation hors-ligne (PHL) émerge comme une solution pour pallier ces inconvénients.
Elle permet de créer, de simuler et de valider les trajectoires et les actions des robots dans un environnement virtuel 3D, sans interrompre la production. Cette approche offre un gain de temps considérable lors de la mise en œuvre de nouvelles tâches ou de modifications de process. De plus, la PHL facilite la gestion de la diversité des marques et des technologies robotiques au sein d’une même ligne, en offrant une plateforme de programmation unifiée. Elle permet également d’anticiper les problèmes potentiels et d’optimiser les cycles de travail avant même l’intervention sur le robot physique, améliorant ainsi la qualité et l’efficacité globale de la production, notamment pour les productions de petites séries ou les pièces uniques.
Simulation 3D et écosystème : des outils pour la conception et la validation des systèmes robotisés
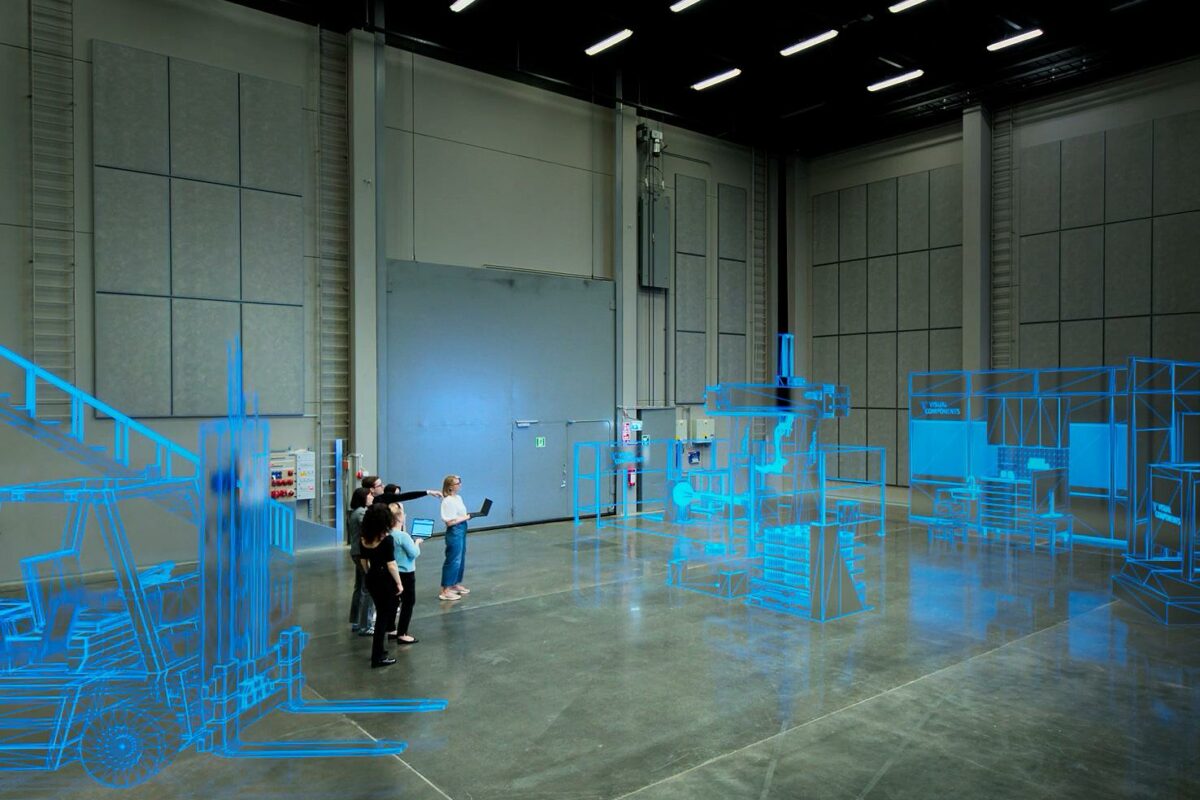
Au cœur de l’offre unifiée Visual Components Robotics OLP se trouve la version 4.10 de la plateforme de simulation 3D de Visual Components. Cet environnement intuitif permet aux intégrateurs, aux fabricants d’équipements (OEM) et aux entreprises industrielles de concevoir et de visualiser leurs plans de fabrication dans un espace virtuel.
 La simulation 3D offre un terrain d’essai crucial pour évaluer différents scénarios d’implantation, identifier les points de blocage potentiels et optimiser l’agencement des équipements avant tout investissement physique. La nouvelle version intègre des fonctionnalités visant à accélérer la création des simulations et à simplifier la connexion avec un plus grand nombre de contrôleurs de robots. L’intégration de la plateforme 3Dfindit donne accès à une vaste bibliothèque de modèles CAO 3D de composants industriels (robots, convoyeurs, machines-outils, etc.), facilitant la construction d’environnements virtuels réalistes. L’amélioration des performances de gestion des nuages de points permet de manipuler des données de numérisation 3D complexes plus rapidement, offrant des simulations encore plus précises et détaillées. Cette capacité à visualiser et à valider virtuellement les systèmes robotisés réduit considérablement les risques et les coûts associés à la mise en œuvre réelle.
La simulation 3D offre un terrain d’essai crucial pour évaluer différents scénarios d’implantation, identifier les points de blocage potentiels et optimiser l’agencement des équipements avant tout investissement physique. La nouvelle version intègre des fonctionnalités visant à accélérer la création des simulations et à simplifier la connexion avec un plus grand nombre de contrôleurs de robots. L’intégration de la plateforme 3Dfindit donne accès à une vaste bibliothèque de modèles CAO 3D de composants industriels (robots, convoyeurs, machines-outils, etc.), facilitant la construction d’environnements virtuels réalistes. L’amélioration des performances de gestion des nuages de points permet de manipuler des données de numérisation 3D complexes plus rapidement, offrant des simulations encore plus précises et détaillées. Cette capacité à visualiser et à valider virtuellement les systèmes robotisés réduit considérablement les risques et les coûts associés à la mise en œuvre réelle.
Faites une recherche parmi tous les articles du site:
Articles similaires dans la même catégorie


Pas de commentaires!
Soyez le premier à commenter
Seuls les utilisateurs enregistrés peuvent commenter. Connectez vous !