
Dalmec présente une nouvelle version du manipulateur PARTNER EQUO : développé sur colonne désaxée, il permet des opérations aisées de manipulations d’arbres porte-bobines de diamètres, de poids et de dimensions variables. Cela en fait un outil de préhension sur mesure à utiliser dans de nombreux domaines d’activité !
Pouvant être utilisé dans de nombreux secteurs (agroalimentaire, bâtiment, chimie, construction, emballage, impression, mécanique, métal, papier, plasturgie, textile…) et tout type de production de bobines, ce nouveau modèle de manipulateur à bras articulé permet ainsi en toute sécurité la prise, le levage, la manutention et le transfert d’arbres porte-bobines, et ce, sans aucun effort de l’opérateur.
La particularité de ce nouveau manipulateur est d’être monté sur une colonne spéciale avec bras désaxé qui permet d’augmenter considérablement le rayon d’action du manipulateur jusqu’à 6500 mm et ainsi d’éviter les obstacles pouvant être présents dans la zone de travail.
L’outil de préhension à pince pneumatique est quant à lui développé sur mesure aux dimensions de l’arbre à manipuler et aux opérations à effectuer sur le poste de travail. Pour garantir un maximum de sécurité à l’opérateur, l’outil de préhension et le panneau de commande sont directement reliés au bras terminal du manipulateur.
Un appareil évolutif, aux « infinies possibilités »
Afin de favoriser une manipulation aisée et sécurisée des arbres-porte bobines, dont le poids peut atteindre jusqu’à 80 kg, et compte tenu des contraintes de hauteur disponible sous plafond dans certains environnements de production ou de stockage, ce manipulateur est également proposé en version surbaissée. En outre, grâce à sa structure évolutive et aux infinies possibilités de faire varier les formes et les dimensions du bras terminal, il s’intègre parfaitement dans les environnements de travail exigus.
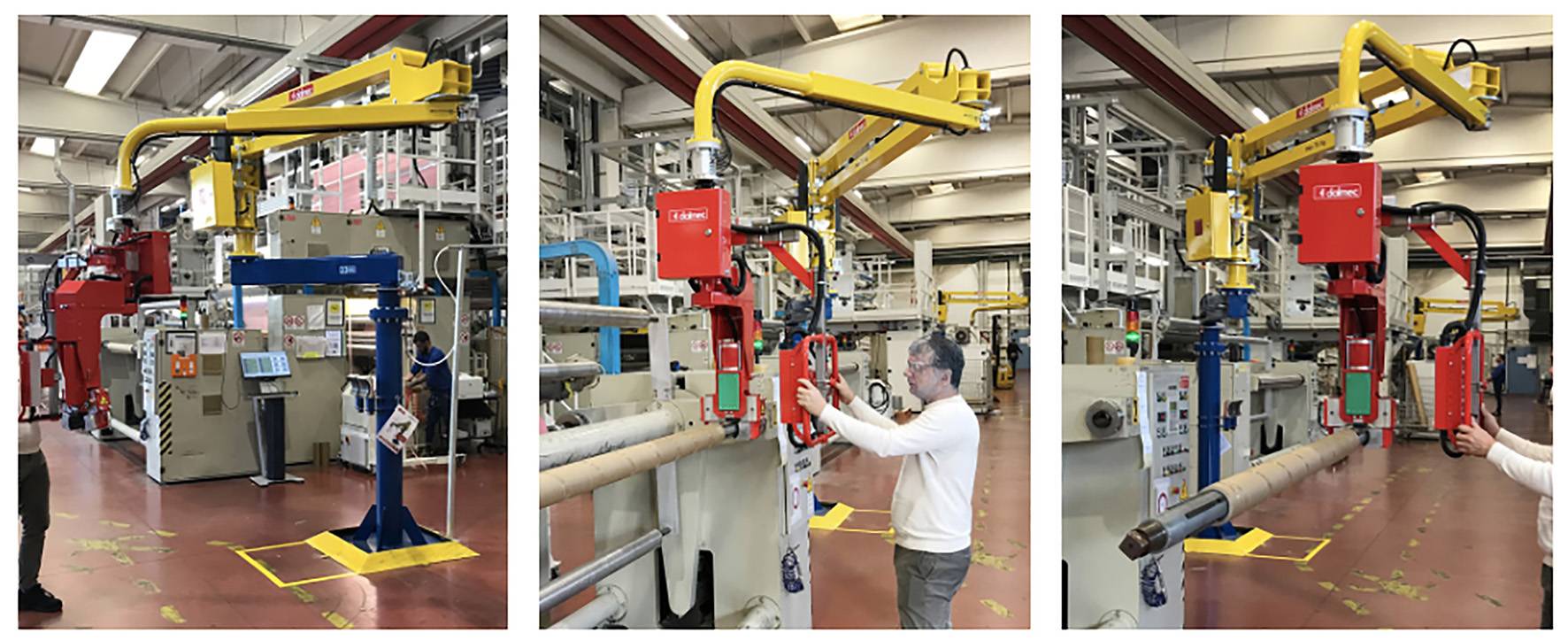
De plus, la structure du manipulateur, qui allie robustesse et légèreté, permet d’annuler l’effet de “dérive“. Tous les mouvements dans l’espace sont libres et sont obtenus grâce à un effort minimal par l’action directe de l’opérateur sur l’outil de préhension ou sur la charge elle-même. L’opérateur peut déplacer sa charge, même en porte-à-faux, dans tous les points du volume de travail sans aucun effort et dans des conditions optimales d’ergonomie et de sécurité.
Faites une recherche parmi tous les articles du site:
Articles similaires dans la même catégorie



Pas de commentaires!
Soyez le premier à commenter

Seuls les utilisateurs enregistrés peuvent commenter. Connectez vous !