L’hybridation de la robotique collaborative et des plateformes mobiles autonomes transforme la logistique de production. En associant la dextérité d’un bras manipulateur à la flexibilité d’un véhicule sans pilote, les industriels déploient une automatisation totalement reconfigurable.
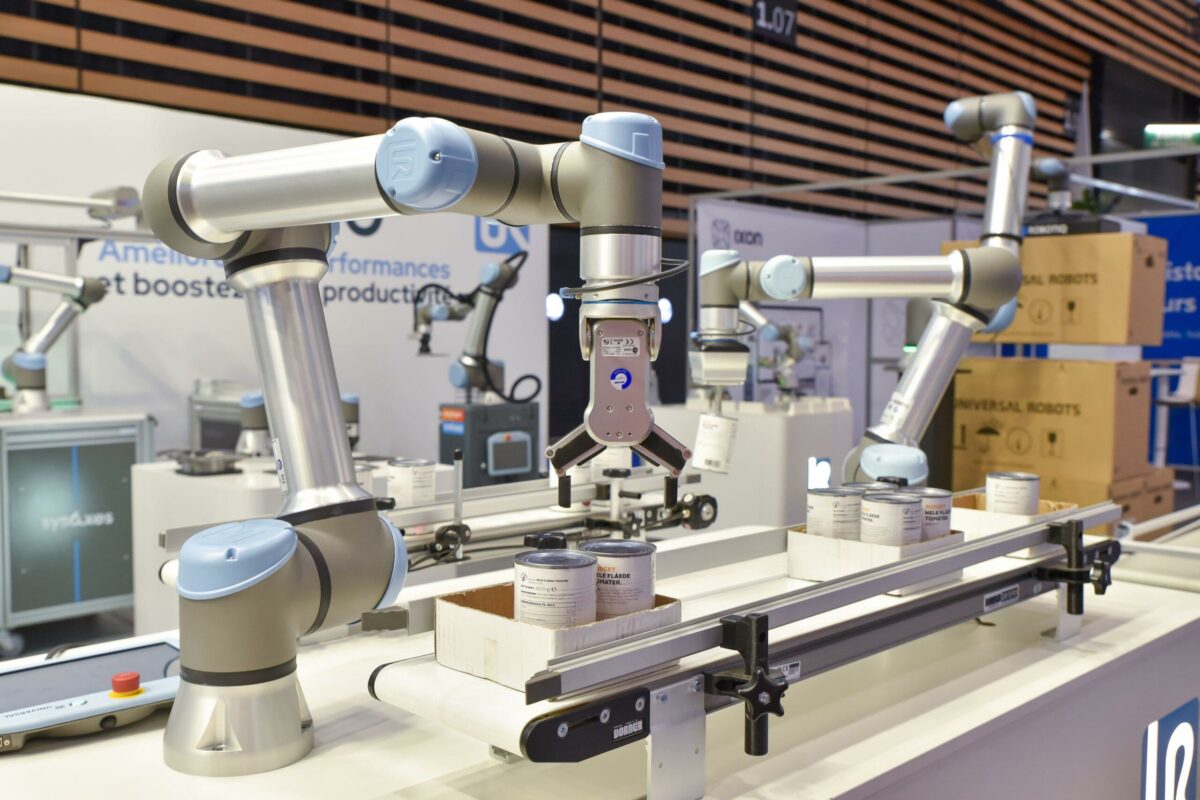
L’évolution des lignes de production manufacturières impose une reconfiguration de plus en plus rapide des postes de travail. Face aux variations de séries et à la personnalisation des produits, les industriels délaissent progressivement les cellules robotisées fixes et rigides au profit de systèmes plus agiles. C’est dans ce contexte technique que les fabricants Universal Robots et Mobile Industrial Robots (MiR), entités du groupe Teradyne Robotics, déploient un écosystème technologique combinant bras manipulateurs collaboratifs (cobots) et robots mobiles autonomes (AMR). Objectif ? Des solutions matérielles et logicielles visant à décloisonner les opérations de manutention, d’assemblage et de contrôle qualité.
Une cinématique qui s’adapte à la montée en charge des applications
 Le déploiement de la cobotique s’étend désormais à des tâches nécessitant une force mécanique et une allonge nettement supérieures. Les bras manipulateurs couvrent aujourd’hui un spectre de charge utile allant de 3 à 35 kg, pour des portées s’étirant de 500 à 1 700 mm. Les récents modèles UR8 Long et UR15 illustrent cette capacité à traiter des opérations physiquement contraignantes telles que le soudage de précision, le chargement de machines-outils ou la palettisation en bout de ligne.
Le déploiement de la cobotique s’étend désormais à des tâches nécessitant une force mécanique et une allonge nettement supérieures. Les bras manipulateurs couvrent aujourd’hui un spectre de charge utile allant de 3 à 35 kg, pour des portées s’étirant de 500 à 1 700 mm. Les récents modèles UR8 Long et UR15 illustrent cette capacité à traiter des opérations physiquement contraignantes telles que le soudage de précision, le chargement de machines-outils ou la palettisation en bout de ligne.
Pour faciliter le paramétrage de ces cinématiques par les ingénieurs et les techniciens d’atelier, l’interface logicielle PolyScope X centralise la gestion des effecteurs et des périphériques tiers de manière unifiée. Cette architecture de contrôle s’enrichit d’un module spécifique, baptisé AI Accelerator, qui permet d’intégrer des algorithmes d’intelligence artificielle directement dans les routines de l’automate, offrant ainsi au robot une capacité d’adaptation accrue face aux imprévus de positionnement ou de vision sur la ligne de production.
L’intralogistique franchit un cap avec le transfert autonome de charges lourdes
La synchronisation entre le poste de travail et l’entrepôt de stockage requiert une flotte de transport capable d’évoluer en toute sécurité dans un environnement humain dynamique. Les plateformes mobiles autonomes cartographient les ateliers pour acheminer les pièces sans nécessiter d’infrastructure de guidage physique au sol. Les formats très compacts, à l’image du robot MiR250, évoluent à des vitesses atteignant 7,2 km/h et se faufilent dans des passages étroits de seulement 80 cm de largeur. À l’autre extrémité du spectre logistique, les flux de palettes denses sont désormais gérés par des transpalettes autonomes (MiR 1200 Pallet Jack) capables de soulever et déplacer jusqu’à 1 200 kg.
L’innovation technique majeure réside aujourd’hui dans l’hybridation totale de ces deux technologies d’automatisation. Des systèmes combinés intègrent un bras collaboratif de grande capacité directement sur le châssis d’une base mobile. Cette architecture (modèle MC600), capable de manipuler des charges globales de 600 kg, transforme le robot en un manipulateur mobile 100 % autonome, apte à réaliser la préhension de cartons ou la maintenance de plusieurs machines réparties à différents endroits de l’usine au cours d’un même cycle d’exploitation.
Faites une recherche parmi tous les articles du site:
Articles similaires dans la même catégorie




Pas de commentaires!
Soyez le premier à commenter
Seuls les utilisateurs enregistrés peuvent commenter. Connectez vous !